Basically estimation and tracking is easy terminology by understanding definition of respective keywords. Additionally, in a viewpoint of each results, both may same exactly although have different meaning. There are two methods of tracking human pose, one is top-down, the other is bottom-up. In my comprehension estimation is usually used in an image and tracking is used in a video.
Top-down method is basically detecting boxes first and annotate the keypoints with connecting line to draw like pose in the boxes. Bottom-up method is detecting all the keypoints first and showing the result.
 .
.
According to [Pose Flow: Efficient Online Pose Tracking from Shanghai Jiao Tong University], top-down method is much more effective in both accuracy and tracking speed. In a definition of accuracy, there are two checking systems, which are mAP(mean average precision) and MOTA(multiple object tracking accuracy, not precision) respectively.
New Terminology
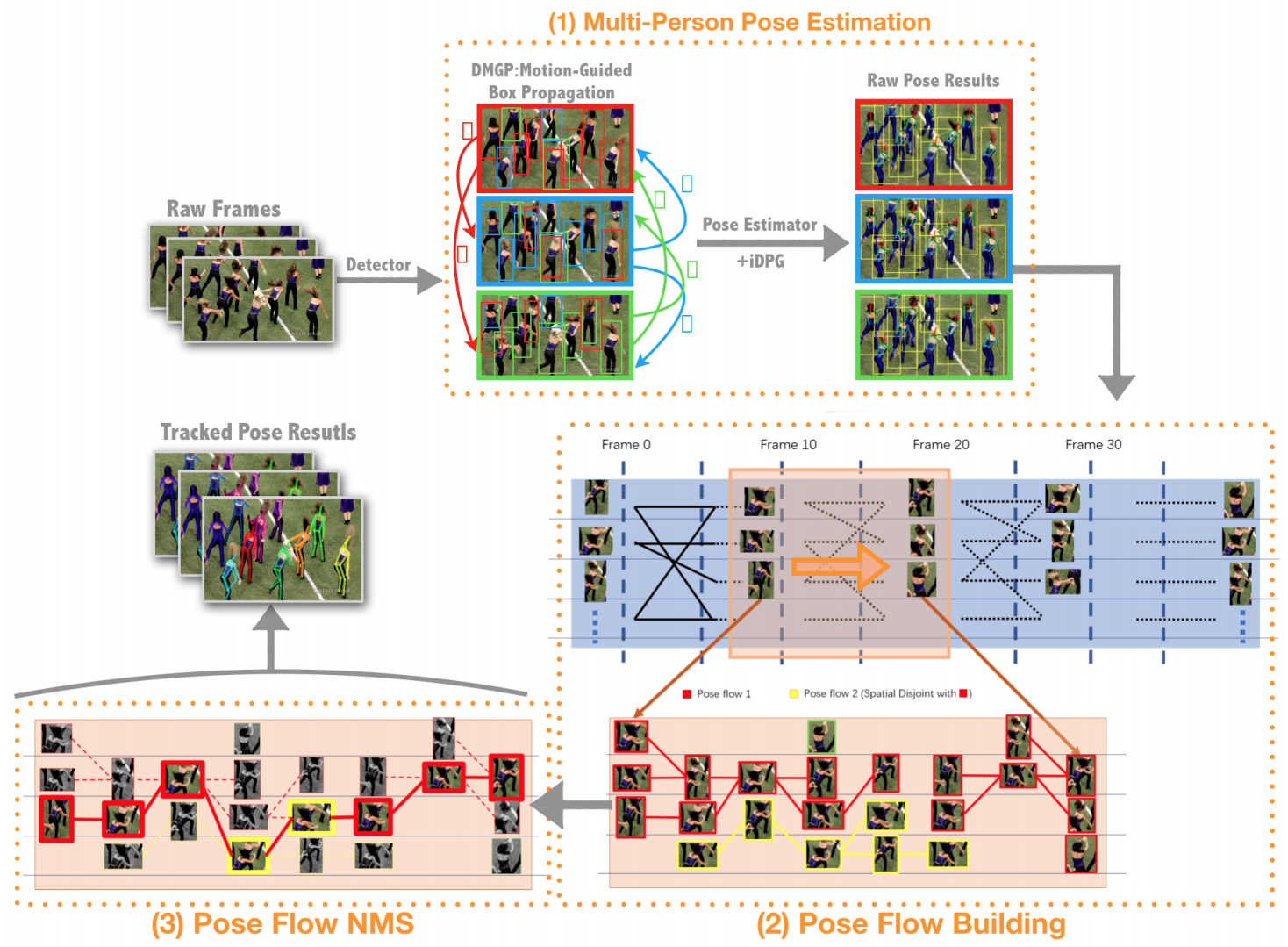
- Improved RMPE (Regional Multi Person Estimator) : estimator
- PF - Builder (Pose Flow Building) According to below figure (2)
- PF NMS (Pose Flow non maximum suppersion) : reducing redundant link from adjacent frame
 .
.
In (2) it calculates Intra-Frame Pose Distance based on [RMPE: Regional Multi-Person Pose Estimation].
\(P_i\) is a pose in a frame, i indicates the number of instances in one frame. It assumes that pose has m joints in one pose with denoted as \({\langle k^1_i, c^1_i \rangle,...,\langle k^m_i, c^m_i \rangle}\). \(k\) represent the position of joints and \(c\) is the score of prediction in \(i^{th}\) frame with m different keypoints.
Distance is denoted as \(d_{pose}(P_i,P_j)\) and assuming \(B_i\) is standing for box of \(P_i\) \(K_{sim}(P_1,P_2|\sigma_1) = \begin{cases} \sum_{n}tanh \frac{c_1^n}{\sigma_1} tanh \frac{c_2^n}{\sigma_1} & {p_{2}^{n}} \text{is within} {B(p_{1}^{n})} \\ 0 & \text{otherwise} \end{cases}\)
Question: Does tracking algorithm is for more precise accuracy instead of lightweightning of model?
Reference
[1] https://arxiv.org/pdf/1802.00977.pdf
[2] https://arxiv.org/pdf/1712.09184.pdf
[3] https://medium.com/@jonathan_hui/map-mean-average-precision-for-object-detection-45c121a31173
[4] https://motchallenge.net/results/3D_MOT_2015/?chl=3&orderBy=MOTA&orderStyle=DESC&det=Public
[5] https://arxiv.org/pdf/1612.00137.pdf
GitHub
[1] https://github.com/YuliangXiu/PoseFlow